02 入門
在 CIFAR-10 上訓練一個 CNN
從 pytorch 軌道的灰階 MNIST,升級到彩色、更難的 CIFAR-10,用上現代 CNN 的標準配備:Conv→BatchNorm→ReLU 堆疊、MaxPool 降尺寸、Dropout 抗過擬合。
這堂課的完整程式碼在 Jupyter notebook 裡。點下面按鈕在 Colab 開啟,就能直接執行、修改、實驗——你的修改不會動到原檔。
ml/pytorch 軌道你在灰階的 MNIST 上跑過 CNN。這課升級到彩色、更難的 CIFAR-10,並用上現代 CNN 的標準配備。目標不是衝 SOTA,而是讓你看到一個「像樣的」CNN 怎麼組、怎麼在真實彩色資料上學起來。
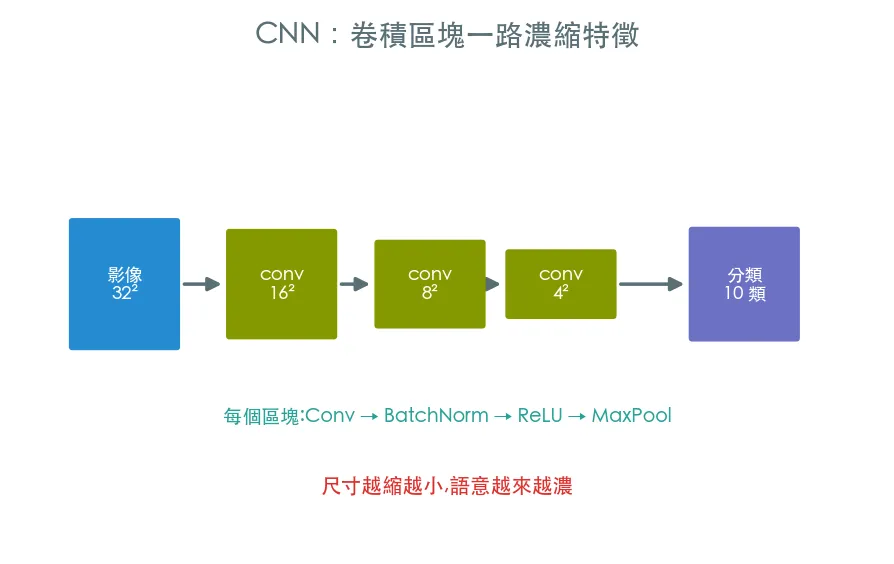
現代 CNN 的標準三件配備
- Conv → BatchNorm → ReLU 堆疊:BatchNorm 讓每層輸入分布穩定,訓練更快更穩。
- MaxPool 降尺寸:每個區塊把空間尺寸減半(32→16→8→4),濃縮特徵、擴大感受野。
- Dropout:全連接層前隨機關掉一部分神經元,對抗過擬合。
這堂課你會學到
- 用
conv_block把「兩層 conv + BN + ReLU + pool」模組化,堆成一個三段式 CNN - 在 CIFAR-10 上跑標準訓練迴圈(約 6 個 epoch,T4 幾分鐘)
- 評估測試準確率,理解純手刻 CNN 的天花板在哪
為什麼還要手刻一遍?
明明下一課的遷移學習更強,為什麼先手刻?因為你得先親眼看到「從零訓練」的成本與極限——資料要多、訓練要久、準確率還卡在某個水準——才會真正體會遷移學習為什麼是業界預設。痛過,才懂捷徑的價值。
💡 這課的 CNN 刻意保持簡單好讀。想進階?加深網路、用 residual 連接(就是 ResNet 的核心),準確率還能再往上——但那也正是「不如直接用預訓練 ResNet」的轉折點,銜接下一課。
#cv
#cnn
#cifar
#batchnorm
留言 0
留言載入中…